关于博主
👏👏👏 欢迎来到我的个人主页
✍️✍️✍️ 这里是我的平常学习记录和学习感悟 ~~~ 博客复兴🤙🤙🤙
指南针🎶🐱🐉🏄♂️
个人技能🏅
-
🎓 熟练使用C/C++语言,熟悉OOP特性,熟悉常用数据结构,算法,设计模式
-
💼 熟悉点云匹配,点云过滤和点云去噪等点云算法,熟悉点云数据与影像数据多源融合算法。熟练使用PCL库,有良好的国内外论文文献查阅能力,有点云处理相关项目实践开发经验
-
👝 熟悉影像三维重建流程,主流的开源三维重建框架(SfM + MVS\Bundler等);熟悉计算机视觉和图像处理的基本算法,熟悉OpenCV图像开发库和常用图像视频协议规范
-
👜 熟练使用Visual Studio 开发平台,熟练掌握软件开发的调试技巧,掌握动态库编写,掌握C++/CLI等图形界面开发,熟悉Qt Creator开发环境,熟悉Qt绘图,布局和信号与槽等
-
☂️ 熟悉软件说明文档与开发日志的写作,有规范命名,写注释,缩进统一的良好编程习惯
-
🌂 熟练掌握MySQL数据库的部署,实施,排查,故障分析处理,有相关项目经验。具备数据库设计能力,熟悉存储过程与范式
-
👖 熟悉Linux系统、熟悉命令行操作模式和常用命令,了解python,shell等脚本语言,有使用TensorFlow框架的图像深度学习科研经验,熟练使用Vim等工具;
-
👕 自学HTML/CSS/JavaScript,对jQuery、Vue等前端框架有一定的了解
-
👒 熟练使用集中式项目管理工具SVN与分布式管理工具Git,掌握常用管理命令,有个人GitHub网站和项目;
-
🤴有使用TensorFlow与Caffe(C++)的深度学习科研经历,旨在通过学习实现点云与影像的特征匹配从而达到多源数据融合
-
🙅♂具备良好的沟通能力、很强的团队意识与责任心,尽职尽责,空闲时间常常学习充电
-
🕴有个人GitHub项目,和基于GitHub的个人网站GitHub主页🎓,LeetCode刷题通过量约500题
开发项目✍️
1️⃣ 地下电缆三维建模系统开发项目
📆 2018.9-2019.10
- 项目描述⚔️:
系统以C++为开发语言,以DirectX作为引擎的三维底层图形库,采用面向对象的方法和软件工程思想进行架构设计,将业务逻辑、数据、界面相分离的方法对软件进行模块化开发,通过建立多源空间数据模型,实现了地下电缆全要素空间数据的一体化管理、三维可视化与自动化建模。软件依次划分为数据库模块、工井模型渲染模块、三维建模模块、基础类库四个核心模块,每个模块负责不同的业务和功能,模块内高度封装,模块间相互独立,利用消息进行通信,实现了高内聚、低耦合的系统集成,代码管理使用TortoiseSVN。 - 项目职责🔨:
- 软件图形界面开发与设计,界面窗口间信息通信。
- 影像算法模块。以三维坐标点数据为基础,采用数字图像处理技术生成影像数据。全景影像数据三维展示,二维影像添加单位注记,影像数据显示与管理。
- 数据库引擎(MySQL)架构设计,存储地下电缆设施数据,数据主要分为结构化数据与非结构化数据:表与表之间主键、外键、视图的建立及多种地下电缆设备属性的增、删、查、改,更新电缆信息。
- 负责三维模型的导入导出管理,三维模型纹理贴图,使用AutoDesk FBX/C++SDK开发。
2️⃣ 车载激光点云处理系统
📆 2019.8-2020.6
- 项目描述⚔️:
车载激光点云处理系统是基于车载Lidar数据,自动提取道路中心线、特征地物,三维激光点云特征实体集等信息。特征地物点包括:桥头、隧道口、道路交叉口、道路指示牌、交通监控架、里程碑、电线杆、独立树、其他容易辨认长久存在且形状规则的地物。 - 项目职责🔨:
- 负责车载数据的车道线提取工作,采用点云生成二维影像方法,利用OpenCV库对影像目标进行阈值分割,边缘提取等操作进而转换回点云数据,进行标线提取;
- 使用C++/CLI搭建平台部分主界面与点云数字影像展示图形窗口的设计;
- 负责路灯提取;采用区域生长算法实现提取过程。
3️⃣ 北京市文物移动执法系统
📆 2018.10-2019.2
- 项目描述⚔️:
该项目主旨为通过利用GPS定位,对移动执法平台的三维空间点云等各种数据实现调用、查询等功能,对地面现状文物建筑及周边环境的现场调查、局部测量、拍照、取证等,辅助文物执法人员对文物建筑的安全管理工作。 - 项目职责🔨:
- 模型数据影像匀光,滤波等处理。纹理映射,模型贴图,真实化三维模型;
- 对点云和模型数据通过包围盒建立空间渲染结构,进行多块点云及多个模型共同渲染。
科研工作🎓
- 研究摘要
多源点云数据融合相对于单一数据扩展了数据应用面,有助于提高点云利用率。通过不同方法得到的三维点云数据由于获取途径与设备误差的影响,不同数据之间往往存在着尺度不一致,初始位置相差大,噪声较大产生较大的特征误匹配等问题。本文使用三维重建点云对激光点云进行修复,提出一种适用不同尺度点云数据的全局优化的自动点云融合方法,融合结果与点云初始位置无关,并对噪声较大与特征错配率较高数据具有稳定性。通过从点云数据中提取特征描述信息进行匹配,并通过误匹配去除与几何相似筛选,将确定的点云对应关系代入含尺度变量的目标函数并逐一优化各个分量,计算结果作为初始值代入Scale-ICP中进行精确融合。实验表明本文方法在处理不同尺度含外点的实测数据时具有良好的融合结果。 - 研究成果
- 融合效果
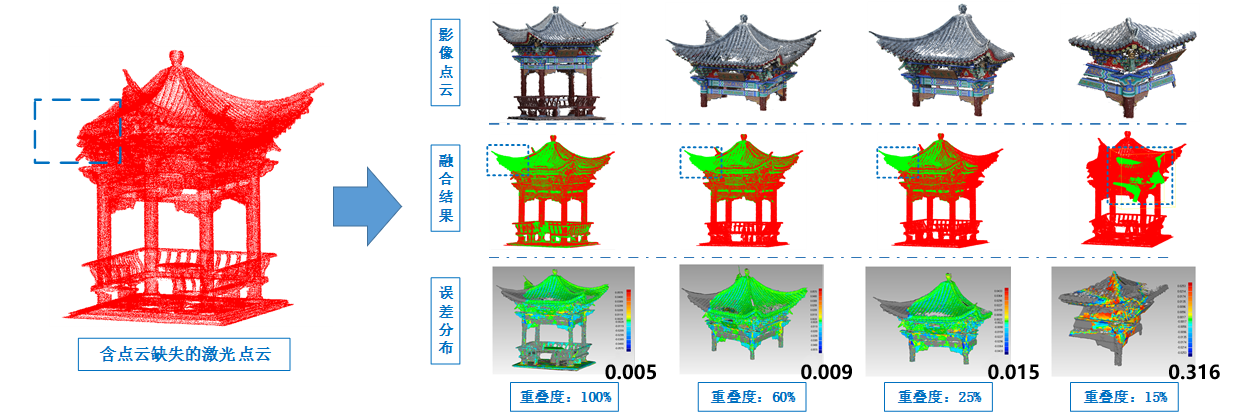
- 融合精度
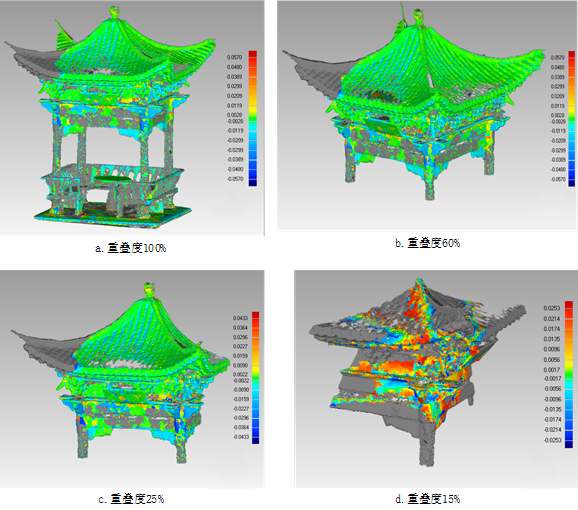
- 融合效果
获奖与证书✨
- ⭐️ 2015年获得大学英语四级证书
- ⭐️ 2017年获得大学英语六级证书
- ⭐️ 2016福建省测绘技能大赛二等奖
- ⭐️ 2018年度研究生学业奖学金
- ⭐️ 2019年度研究生学业奖学金